Neurosymbolic Software Tutorial - NEAR Bouncing Ball#
Instruction#
Navigating this notebook on Google Colab: There will be text blocks and code blocks throughout the notebook. The text blocks, such as this one, will contain instructions and questions for you to consider. The code blocks, such as the one below, will contain executible code. Sometimes you will have to modify the code blocks following the instructions in the text blocks. You can run the code block by either pressing control/cmd + enter or by clicking the arrow on left-hand side.
Saving Work: If you wish to save your work in this .ipynb, we recommend downloading the compressed repository from GitHub, unzipping it, uploading it to Google Drive, and opening this notebook from within Google Drive.
Notebook#
In this notebook, you will construct a DSL to simulate a bouncing ball
%load_ext autoreload
%autoreload 2
%matplotlib inline
import logging
import os
import numpy as np
import matplotlib.pyplot as plt
import torch
import torch.nn as nn
import neurosym as ns
from neurosym.examples import near
from neurosym.examples.near.operations.basic import ite_torch
from neurosym.examples.near.operations.lists import map_torch
from neurosym.datasets.load_data import DatasetFromNpy, DatasetWrapper
from neurosym.utils.imports import import_pytorch_lightning
pl = import_pytorch_lightning()
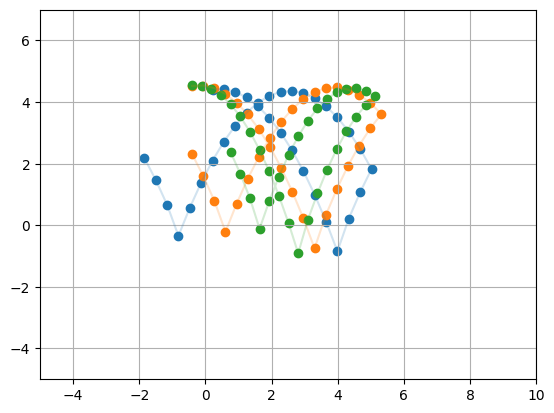
Data#
We then load and plot some bouncing ball trajectories. Note that these trajectories are represented as a list [x, y, vx, vy]
dataset_factory = lambda train_seed: DatasetWrapper(
DatasetFromNpy(
f"bouncing_ball_exercise/data/bounce_example/train_ex_data.npy",
f"bouncing_ball_exercise/data/bounce_example/train_ex_labels.npy",
train_seed,
),
DatasetFromNpy(
f"bouncing_ball_exercise/data/bounce_example/test_ex_data.npy",
f"bouncing_ball_exercise/data/bounce_example/test_ex_labels.npy",
None,
),
batch_size=200,
)
datamodule = dataset_factory(42)
def plot_trajectory(trajectory, color):
plt.scatter(trajectory[:, 0], trajectory[:, 1], marker="o", color=color)
plt.plot(trajectory[:, 0], trajectory[:, 1], alpha=0.2, color=color)
plt.xlim(-5, 10)
plt.ylim(-5, 7)
plt.grid(True)
for i in range(3):
plot_trajectory(datamodule.train.inputs[i], f"C{i}")
print("input[0] :", datamodule.train.inputs[i, 0])
print("output[0]:", datamodule.train.outputs[i, 0])
input[0] : [-0.40642968 4.5408607 2.9196808 -0.05576635]
output[0]: [-0.11446159 4.535284 2.9196808 -1.0357664 ]
Exercise: DSL#
Fill in the bounce_dsl to parameterize the space of functions that could represent the trajectories of bouncing balls.
def bounce_dsl():
L = 4
O = 4
dslf = ns.DSLFactory(L=L, O=O, max_overall_depth=5)
# BEGIN SOLUTION "YOUR CODE HERE"
## DSL for the bounce example.
dslf.typedef("fL", "{f, $L}")
dslf.parameterized(
"linear_bool",
"() -> $fL -> f",
lambda lin: lin,
dict(lin=lambda: nn.Linear(L, 1)),
)
dslf.parameterized(
"linear", "() -> $fL -> $fL", lambda lin: lin, dict(lin=lambda: nn.Linear(L, L))
)
dslf.concrete("ite", "(#a -> f, #a -> #a, #a -> #a) -> #a -> #a", ite_torch)
dslf.concrete(
"map", "(#a -> #b) -> [#a] -> [#b]", lambda f: lambda x: map_torch(f, x)
)
# END SOLUTION
dslf.prune_to("[$fL] -> [$fL]")
return dslf.finalize()
dsl = bounce_dsl()
DSL Printout#
See your DSL printed below, and ensure it is what you would expect
print(dsl.render())
ite :: (#a -> f, #a -> #a, #a -> #a) -> #a -> #a
map :: (#a -> #b) -> [#a] -> [#b]
linear_bool[lin] :: () -> {f, 4} -> f
linear[lin] :: () -> {f, 4} -> {f, 4}
Setting up Neural DSL#
input_dim, output_dim = 4, 4
t = ns.TypeDefiner(L=input_dim, O=output_dim)
t.typedef("fL", "{f, $L}")
neural_dsl = near.NeuralDSL.from_dsl(
dsl=dsl,
modules={
**near.create_modules(
"mlp",
[t("($fL) -> $fL")],
near.mlp_factory(hidden_size=10),
),
**near.create_modules(
"rnn_seq2seq",
[t("([$fL]) -> [$fL]")],
near.rnn_factory_seq2seq(hidden_size=10),
),
},
)
logging.getLogger("pytorch_lightning.utilities.rank_zero").setLevel(logging.WARNING)
logging.getLogger("pytorch_lightning.accelerators.cuda").setLevel(logging.WARNING)
trainer_cfg = near.NEARTrainerConfig(
lr=5e-3,
max_seq_len=300,
n_epochs=100,
num_labels=output_dim,
train_steps=len(datamodule.train),
loss_callback=torch.nn.functional.mse_loss,
scheduler="cosine",
optimizer=torch.optim.Adam,
)
validation_cost = near.ValidationCost(
neural_dsl=neural_dsl,
trainer_cfg=trainer_cfg,
datamodule=datamodule,
callbacks=[
pl.callbacks.EarlyStopping(monitor="val_loss", min_delta=1e-4, patience=5)
],
enable_progress_bar=False,
enable_model_summary=False,
progress_by_epoch=True,
)
g = near.near_graph(
neural_dsl,
ns.parse_type(
s="([{f, $L}]) -> [{f, $O}]", env=ns.TypeDefiner(L=input_dim, O=output_dim)
),
is_goal=neural_dsl.program_has_no_holes,
)
Run NEAR#
iterator = ns.search.bounded_astar(g, validation_cost, max_depth=16)
best_program_nodes = []
# Let's collect the top four programs
while len(best_program_nodes) <= 3:
try:
node = next(iterator)
cost = validation_cost(node)
best_program_nodes.append((node, cost))
print("Got another program")
except StopIteration:
print("No more programs found.")
break
training ??::<[{f, 4}] -> [{f, 4}]>
training (ite ??::<[{f, 4}] -> f> ??::<[{f, 4}] -> [{f, 4}]> ??::<[{f, 4}] -> [{f, 4}]>)
training (map ??::<{f, 4} -> {f, 4}>)
training (__neural_dsl_internal_rnn_seq2seq_1)
training (map (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>))
training (map (linear))
training (map (__neural_dsl_internal_mlp_1))
training (map (linear))
Got another program
training (map (ite (linear_bool) ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (linear) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (linear)))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (__neural_dsl_internal_mlp_1)))
training (map (ite (linear_bool) (linear) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (linear) (linear)))
training (map (ite (linear_bool) (linear) (__neural_dsl_internal_mlp_1)))
training (map (ite (linear_bool) (linear) (linear)))
Got another program
training (map (ite (linear_bool) (ite (linear_bool) ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (ite (linear_bool) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>) ??::<{f, 4} -> {f, 4}>) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (ite (linear_bool) (linear) ??::<{f, 4} -> {f, 4}>) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (ite (linear_bool) (__neural_dsl_internal_mlp_1) ??::<{f, 4} -> {f, 4}>) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (ite (linear_bool) (linear) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>)) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (ite (linear_bool) (linear) (linear)) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (ite (linear_bool) (linear) (__neural_dsl_internal_mlp_1)) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>)) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (linear)) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (__neural_dsl_internal_mlp_1)) ??::<{f, 4} -> {f, 4}>))
training (map (ite (linear_bool) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (__neural_dsl_internal_mlp_1)) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (__neural_dsl_internal_mlp_1)) (linear)))
training (map (ite (linear_bool) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (__neural_dsl_internal_mlp_1)) (__neural_dsl_internal_mlp_1)))
training (map (ite (linear_bool) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (linear)) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (linear)) (linear)))
training (map (ite (linear_bool) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (linear)) (__neural_dsl_internal_mlp_1)))
training (map (ite (linear_bool) (ite (linear_bool) (linear) (linear)) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (ite (linear_bool) (linear) (linear)) (linear)))
training (map (ite (linear_bool) (ite (linear_bool) (linear) (linear)) (__neural_dsl_internal_mlp_1)))
training (map (ite (linear_bool) (ite (linear_bool) (linear) (__neural_dsl_internal_mlp_1)) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (ite (linear_bool) (linear) (__neural_dsl_internal_mlp_1)) (linear)))
training (map (ite (linear_bool) (ite (linear_bool) (linear) (__neural_dsl_internal_mlp_1)) (__neural_dsl_internal_mlp_1)))
training (map (ite (linear_bool) (ite (linear_bool) (linear) (linear)) (linear)))
Got another program
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite (linear_bool) ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite (linear_bool) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>) ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite (linear_bool) (linear) ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite (linear_bool) (__neural_dsl_internal_mlp_1) ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>))))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (linear))))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (__neural_dsl_internal_mlp_1))))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite (linear_bool) (linear) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>))))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite (linear_bool) (linear) (linear))))
training (map (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite (linear_bool) (linear) (__neural_dsl_internal_mlp_1))))
training (map (ite (linear_bool) (linear) (ite (linear_bool) ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (linear) (ite (linear_bool) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>) ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (linear) (ite (linear_bool) (linear) ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (linear) (ite (linear_bool) (__neural_dsl_internal_mlp_1) ??::<{f, 4} -> {f, 4}>)))
training (map (ite (linear_bool) (linear) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>))))
training (map (ite (linear_bool) (linear) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (linear))))
training (map (ite (linear_bool) (linear) (ite (linear_bool) (__neural_dsl_internal_mlp_1) (__neural_dsl_internal_mlp_1))))
training (map (ite (linear_bool) (linear) (ite (linear_bool) (linear) (ite ??::<{f, 4} -> f> ??::<{f, 4} -> {f, 4}> ??::<{f, 4} -> {f, 4}>))))
training (map (ite (linear_bool) (linear) (ite (linear_bool) (linear) (linear))))
training (map (ite (linear_bool) (linear) (ite (linear_bool) (linear) (__neural_dsl_internal_mlp_1))))
training (map (ite (linear_bool) (linear) (ite (linear_bool) (linear) (linear))))
Got another program
Top 3 Programs#
The code below assumes you found some top 3 programs and stored them in the best_program_nodes variable.
best_program_nodes = sorted(best_program_nodes, key=lambda x: x[1])
for i, (node, cost) in enumerate(best_program_nodes):
print(
"({i}) Cost: {cost:.4f}, {program}".format(
i=i, program=ns.render_s_expression(node.program), cost=cost
)
)
(0) Cost: 9.5617, (map (ite (linear_bool) (linear) (linear)))
(1) Cost: 9.9155, (map (ite (linear_bool) (ite (linear_bool) (linear) (linear)) (linear)))
(2) Cost: 14.4255, (map (ite (linear_bool) (linear) (ite (linear_bool) (linear) (linear))))
(3) Cost: 18.8737, (map (linear))
The function below is set up to further fine tune the program, test it, and return a set of values produced by it.
def testProgram(best_program_node):
module = near.TorchProgramModule(
dsl=neural_dsl, program=best_program_node[0].program
)
pl_model = near.NEARTrainer(module, config=trainer_cfg)
trainer = pl.Trainer(
max_epochs=4000,
devices="auto",
accelerator="cpu",
enable_checkpointing=False,
logger=False,
callbacks=[
pl.callbacks.EarlyStopping(monitor="val_loss", min_delta=1e-4, patience=5)
],
enable_progress_bar=False,
)
trainer.fit(pl_model, datamodule.train_dataloader(), datamodule.val_dataloader())
T = 100
path = np.zeros((T, 4))
X = torch.tensor(
np.array([0.21413583, 4.4062634, 3.4344807, 0.12440437]), dtype=torch.float32
)
for t in range(T):
path[t, :] = X.detach().numpy()
Y = module(X.unsqueeze(0)).squeeze(0)
X = Y
return path
# We generate trajectories for the top 2 programs.
trajectory = testProgram(best_program_nodes[0])
trajectoryb = testProgram(best_program_nodes[1])
| Name | Type | Params
---------------------------------------------
0 | model | TorchProgramModule | 45
---------------------------------------------
45 Trainable params
0 Non-trainable params
45 Total params
0.000 Total estimated model params size (MB)
| Name | Type | Params
---------------------------------------------
0 | model | TorchProgramModule | 70
---------------------------------------------
70 Trainable params
0 Non-trainable params
70 Total params
0.000 Total estimated model params size (MB)
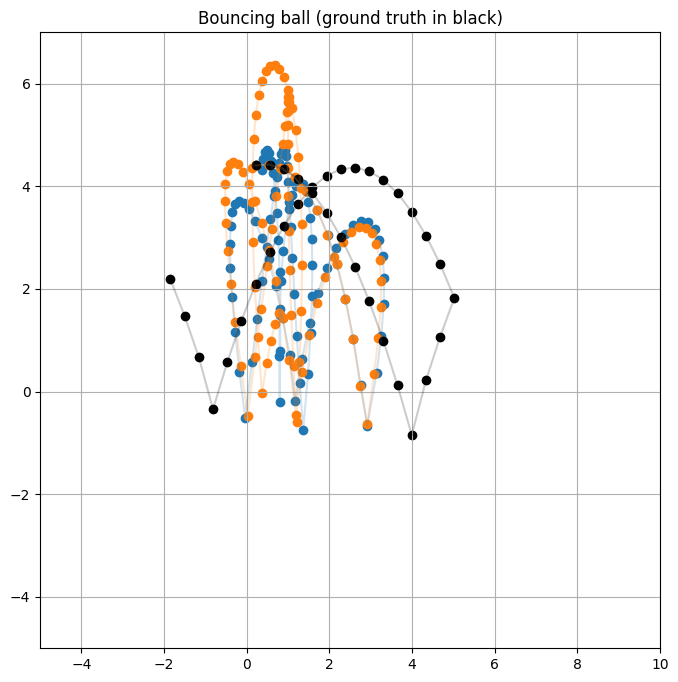
Plotting Trajectories#
plt.figure(figsize=(8, 8))
plot_trajectory(trajectory, "C0")
plot_trajectory(trajectoryb, "C1")
plot_trajectory(datamodule.train.inputs[0], "black")
plt.title("Bouncing ball (ground truth in black)")
plt.show()